
Robótica
Editorial Sitio Web de Innovación Tecnológica – 18/01/2024
Los músculos artificiales son suaves, miniaturizados y consumen una mínima energía.
[Imagem: Manmatha Mahato et al. – 10.1126/sciadv.adk9752]
Músculo de polímero iónico
Investigadores coreanos han creado un músculo artificial que funciona con un consumo mínimo de energía y produce una fuerza equivalente a 34 veces su peso.
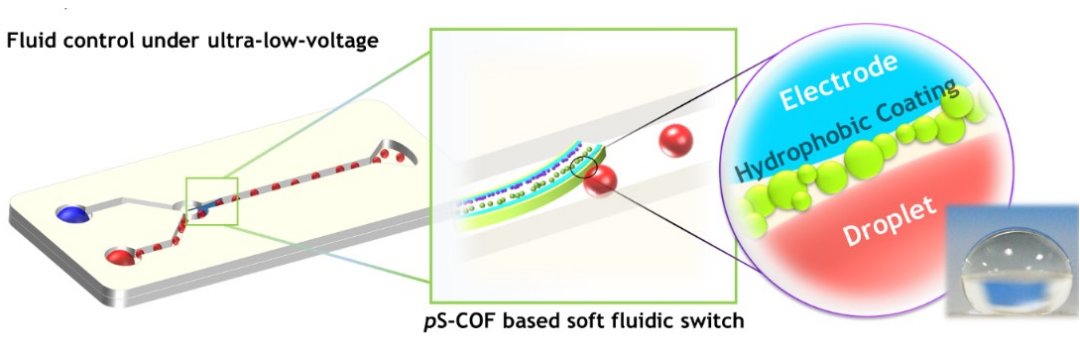
Estos nuevos músculos artificiales de polímero iónico pertenecen a una clase conocida como “interruptores de fluido”, que controlan el flujo haciendo que el fluido se mueva en una dirección específica para generar diferentes movimientos.
Además de ser suave, eliminando la necesidad de elementos duros, el interruptor se activa a muy bajo voltaje y opera en espacios reducidos, lo que lo hace ideal para aplicaciones en robótica y sistemas en miniatura.
«El interruptor de fluido electroquímico suave, que funciona a potencia ultrabaja, puede abrir muchas posibilidades en los campos de la robótica suave, la electrónica suave y los microfluidos basados en el control de fluidos. Desde fibras inteligentes hasta dispositivos biomédicos, esta tecnología tiene el potencial de ser » Se pueden utilizar inmediatamente en una variedad de entornos industriales, ya que se pueden aplicar fácilmente a sistemas electrónicos muy pequeños en nuestra vida diaria”, afirmó Oh, del Instituto Avanzado de Ciencia y Tecnología de Corea del Sur (KAIST).
Los músculos artificiales imitan los músculos humanos y proporcionan movimientos flexibles y naturales en comparación con los actuadores convencionales. Estos actuadores crean movimientos en respuesta a estímulos externos, como electricidad, presión del aire y cambios de temperatura, y para utilizar músculos artificiales es importante controlar estos movimientos con precisión.
Principio de funcionamiento de los músculos artificiales eléctricos iónicos.
[Imagem: Manmatha Mahato et al. – 10.1126/sciadv.adk9752]
Motor eléctrico
Las válvulas basadas en actuadores no funcionan bien en espacios reducidos debido a su rigidez y gran tamaño. Para resolver estos problemas, el equipo desarrolló un actuador electrónico blando que, utilizando una válvula blanda, puede controlar el flujo de fluido y producir grandes cantidades de fuerza, incluso en un tubo estrecho.
Estos músculos artificiales están compuestos de electrodos metálicos y polímeros iónicos y generan fuerza y movimiento en respuesta a la electricidad. Formada mediante la combinación de moléculas orgánicas en la superficie del electrodo, la estructura orgánica covalente de polisulfonato (pS-COF) genera una enorme cantidad de fuerza para su peso y la energía extremadamente baja requerida para impulsarlo (~0,01 eV).
Como resultado, un músculo artificial tan delgado como un mechón de cabello (180 micrómetros de espesor) produjo una fuerza 34 veces su peso (10 mg) en un movimiento suave y sin vibraciones.
condición: Estructura orgánica de polisulfonato covalente como anfitrión de electrodo activo para huéspedes catiónicos móviles en un motor electroquímico blando.
Autores: Manmatha Mahato, Mousumi Garay, Phan Hiep Nguyen, Saeong Oh, Sanghe Nam, Chiang Rong Tseng, Hyungjun Yu, Rasul Tapasian, Ilkwon Oh
Revista: Progreso Científico
doi: 10.1126/sciadv.adk9752

Otras noticias sobre:
Más temas


